








We are in the final stretch! Bag day on Tuesday Feb. 19 signals the end of build season and moves us into competition season. “Bag day” means that we will literally be packing up our competition robot in a massive plastic bag, and we cannot touch the robot again except for during a few designated hours in the week before our first tournament. (Our first tournament is the SE Mass. District Event at Raynham High School in Bridgewater.) We need to have our robot in drivable, bumpered and mechanized condition before we bag it.
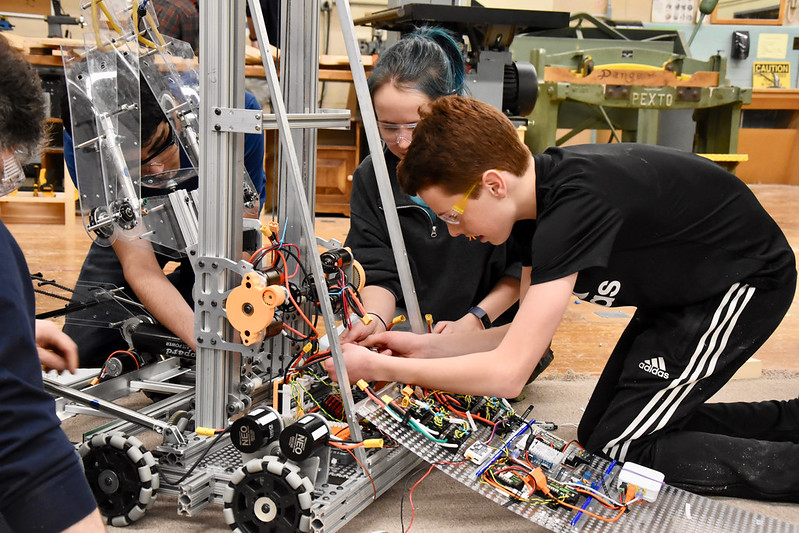
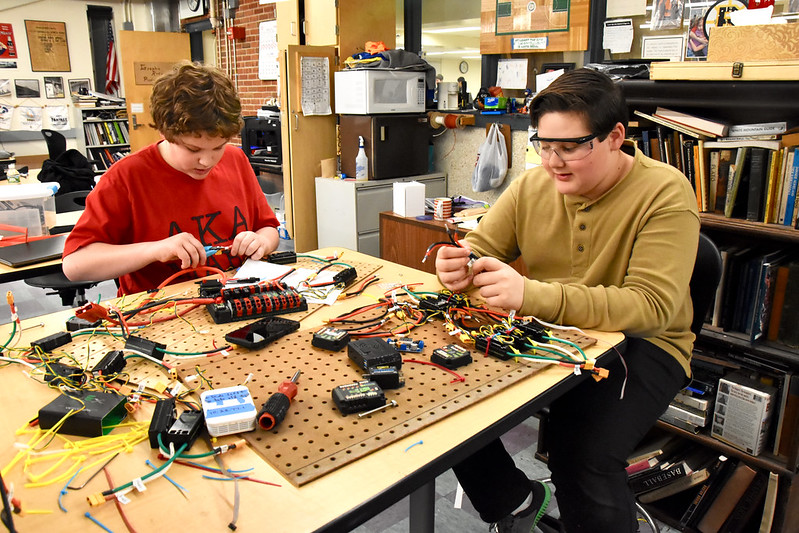
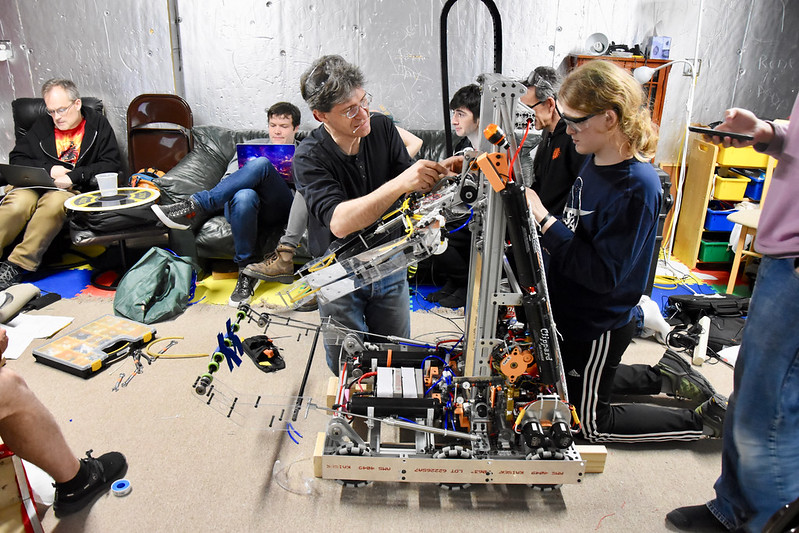
This week we have installed the robot’s pneumatic system and have soldered and wired the electrical system with extreme precision, making sure that there are no short circuits or other small errors that would hamper our robot.
Our software group has written code that allows our robot to pick up and move the cargo (balls) and hatches (discs) effectively, and they are solving some software issues with controlling the ball intake and the motion of the elevator. They have also written an algorithm and code for the camera system that will allow us to see where the robot is going during the “sandstorm” period at the beginning of a match, when the vision of our drive team is blocked.

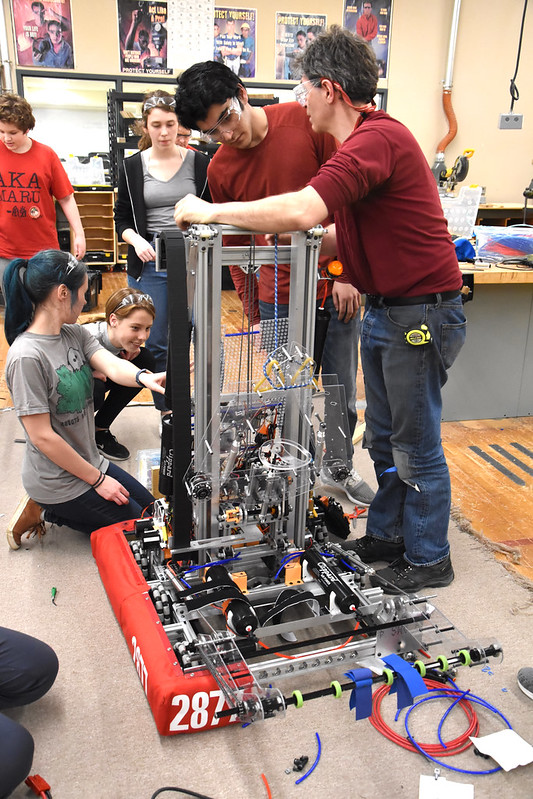
Our CADing group continues to work on 3D models of our electrical components, elevator, and ball intake. They have been making small design changes to ensure that the various robot systems work correctly together—this is despite the assortment of technical problems they have been having with our CADing program.
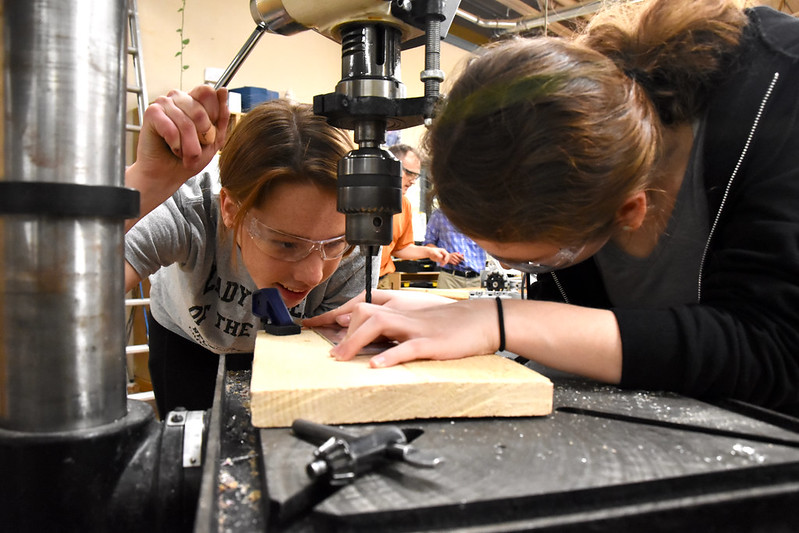
We finished cutting the robot’s perimeter plate, which is the exterior wall of the robot where the bumpers are mounted. Our next step is to build the pool-noodle and cloth bumpers that can flip from red to blue, depending on which alliance color we’ve been assigned to for a match. These carry our team number in large letters so everyone knows that it’s the LigerBots robot they’re watching!

We have also built a second robot chassis this year so we can continue to work on our designs after we bag our competition robot. We are allowed to keep 30 pounds of our 125-pound competition robot out of the bag as a “withholding allowance” for further improvement, so we have decided to retain our claw and ball intake for more work. We will mount these mechanisms on our second chassis along with any other system we might want to add to the competition robot right before a tournament.


In the meantime, our drive team has been working on a technique to efficiently hold and utilize the robot controller. We’re repurposing an Xbox controller, and our drive team has been figuring out an efficient way to be able to press all the buttons needed while playing a match. We are on target to test our driving by the end of the weekend.
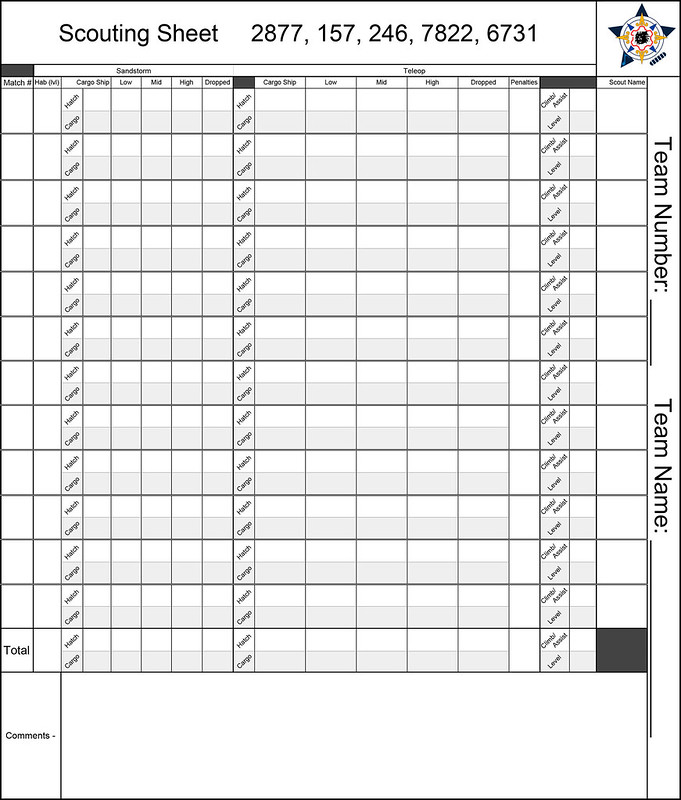
The official competition season has not yet begun, but there are teams who have not only finished their robot before bag day, but are ready to compete! Some have organized unofficial pre-bag-day tournaments so that other teams can test their robot designs and get in some driving practice in a realistic game setting. Our strategy council has assembled a group of team members to start scouting practice this weekend for week 0. We will use these preseason competitions to test out the scouting sheets and scouting process we will use this year. Our scouting alliance continues to grow, and we welcome 6731, Record Robotics! We have further “turduckened” our alliance logo to accommodate this new addition. The next step would be to train our alliance teams on scouting so that we will all have useful data and a successful season.
As noted in previous posts, winning the Chairman’s award would advance us to the next level of competition regardless of how our robot performs. It also would announce us as one of the teams that best expresses what the FIRST organization represents. We previously won the award in 2015 at both the district and NE Championship level. Last week we submitted our essay and questions to FIRST. The other piece of the judging process involves formal and informal presentations at our competitions, so we continue to work on refining our presentation, practicing our elevator pitches and preparing materials like our team overview booklet and flyers. We have even sung and recorded a song for the Chairman’s video, which would get played on a large screen for everyone at the competition should we win.

We have been working on our robot reveal video and preparing for several upcoming outreach trips and events. On Feb. 23 we will be at the MIT Blueprint hackathon with an activity booth and on Feb. 26 we will be meeting with local politicians at the Southern New England Advocacy Conference (SNEAC) about STEM initiatives.
This week we welcomed ALM Works as a new Puma level sponsor! Their donation helps us make up for the loss of one of our larger sponsors earlier this year. This means that we can continue training our team members, building robots and promoting STEM in Newton.
It is really great to see just how far we have come since the start of build season.